---TEMA 1, introducción 🐳---
1 Febrero 2022 🌐
3 Febrero 2022 ♿️
- ROM: sólo lectura. Direcciones más bajas. En ella se encuentra la BIOS. Es una memoria no volátil, es decir, cuando el ordenador está apagado hay una pequeña zona de la memoria con código.
- Intrucción TRAP: intrucción que genera una interrupción que no se corresponde con ningún comportamiento anormal. Permite buscar información en otros sitios, haciendo que se salte a otro programa.
- Tabla de vectores de interrupción: estructura de datos que asocia una lista de manejadores de interrupciones con una lista de solicitudes de interrupciones.
- iRET: coge lo que hay en la memoria y lo pasa a los registros.
NOTA: siempre que se ejecuta el SO se genera una interrupción. NOTA: cuando se produce una interrupción no tiene por qué tomar el control el SO
8 Febrero 2022 🔆
- Llamada al sistema: nombre alternativo para las funciones incluídas en la API del sistema operativo.
- API: primera interfaz que ofrece el SO. A través de esta capa se comunican los programas.
- El usuario interacciona con el SO a través de una interfaz de usuario.
Tipos de sistemas operativos
- Estructurados por capas:
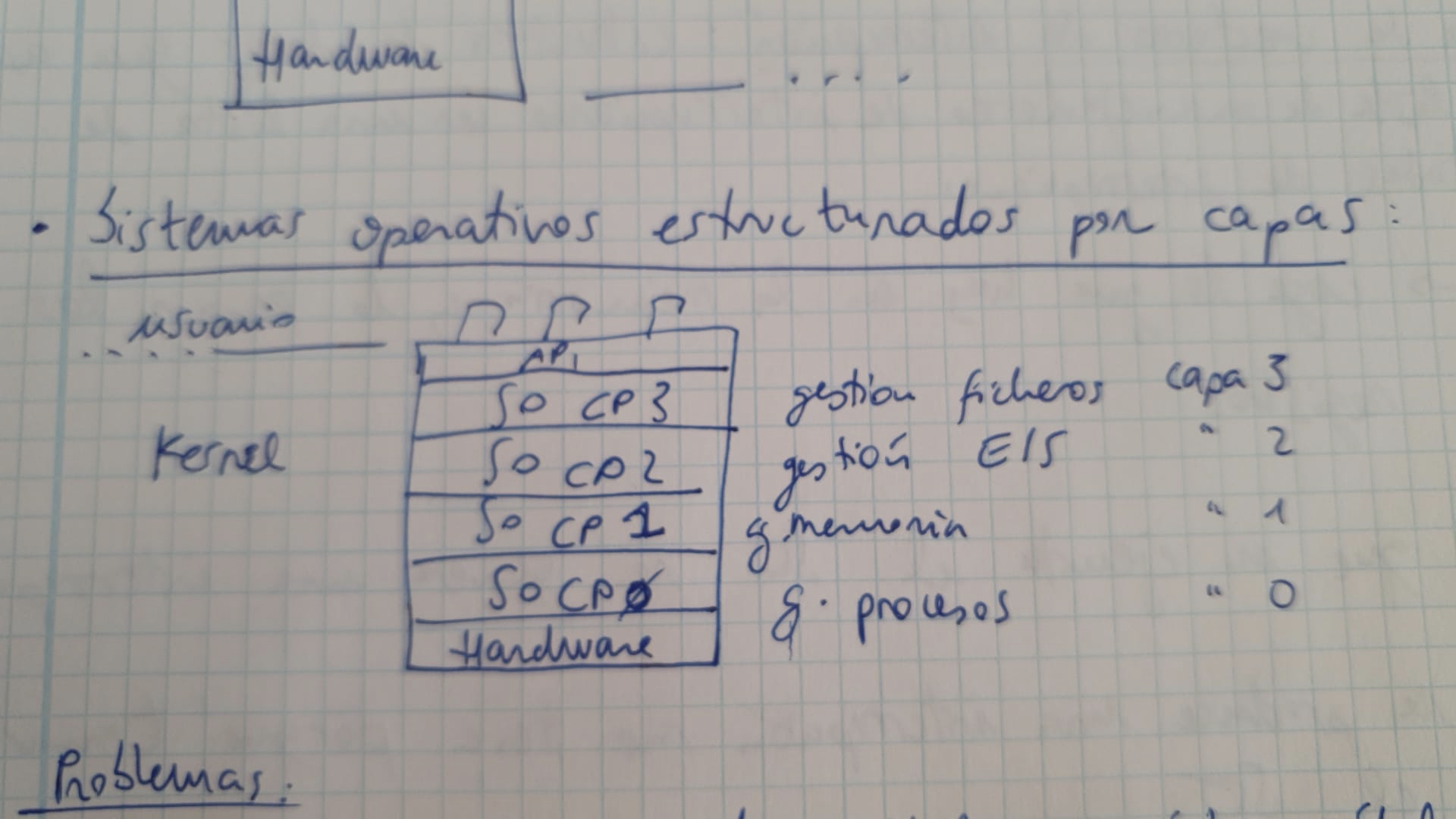
- Problemas: de diseño (qué meto en cada módulo y cuantos módulos tengo), imposible de jerarquizar, y de rendimiento.
- Estructurado micronúcleo:
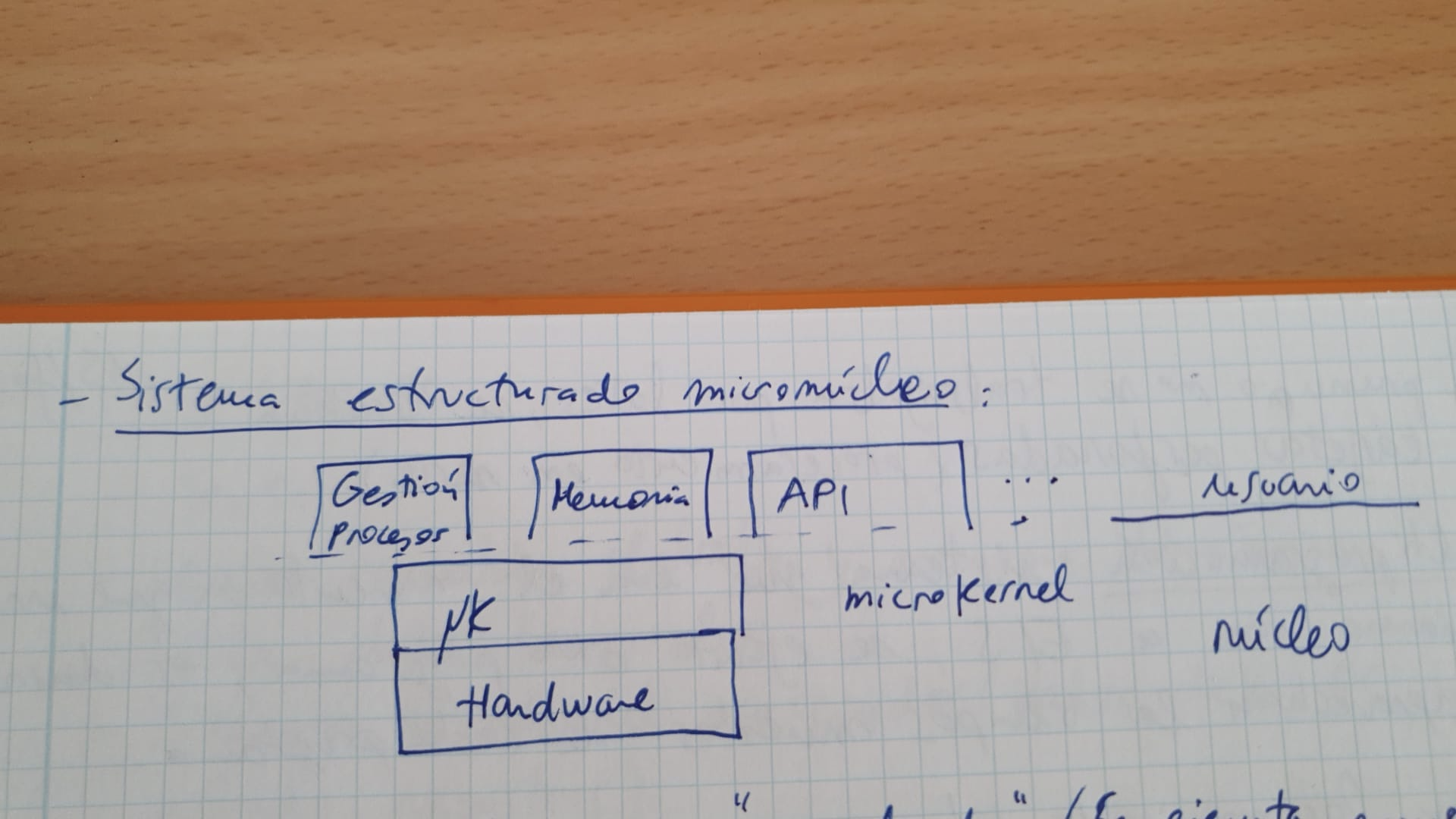
- Ventajas: se puede “parar en caliente” (Se ejecuta menos tiempo en modo núcleo que en uno monolítico).
- Problemas: para cualquier operación hay muchos mensajes. Para cada mensaje hay que cambiar entre usuario y núcleo. Pésimo rendimiento, peor que uno monolítico.
- Híbridos: aprovechan lo mejor de los monolíticos y los estructurados, haciendo una mezcla.
- Distribuídos:
- Puro: el hardware que controla pertenece a máquinas distintas.
- Middleware: capa software por encima del SO que permite compartir recursos entre sí.
15 Febrero 2022 🍀
- Al principio no se trabajaba por lotes, se usaban tarjetas perforadas (procesamiento en serie).
- Multiprogramación (años 60): sistema que en el momento en que un programa pasa a E/S, se ejecuta otro programa, es decir, se aprovechan los tiempos muertos de cada programa.
- Surgen los miniordenadores (años 70).
- Llamada al sistema: manera de decir que un programa de usuario invoca a una función del SO a partir de la API.
---TEMA 2, gestión de procesos 🦚---
17 Febrero 2022 🍄
- Proceso: programa en ejecución.
- Recursos necesarios de los procesos:
- Tiempo de CPU
- Memoria
- Archivos
- Dispositivos de E/S
- Los recursos se asignan a un proceso cuando se crea o durante la ejecución.
- Los procesos son dinámicos (vivos). Cambian durante su ejecución.
- Funciones del SO como gestor de procesos:
- Creación, gestión y eliminación de procesos.
- Planificación de procesos.
- Sincronización y comunicación de procesos.
- Bloqueos mutuos.
- Sobrecarga: trabajo adicional que hace la CPU para ejecutar el SO.
- Un proceso es:
- Texto
- Datos, variables globales y memoria dinámica
- Pila, datos temporales
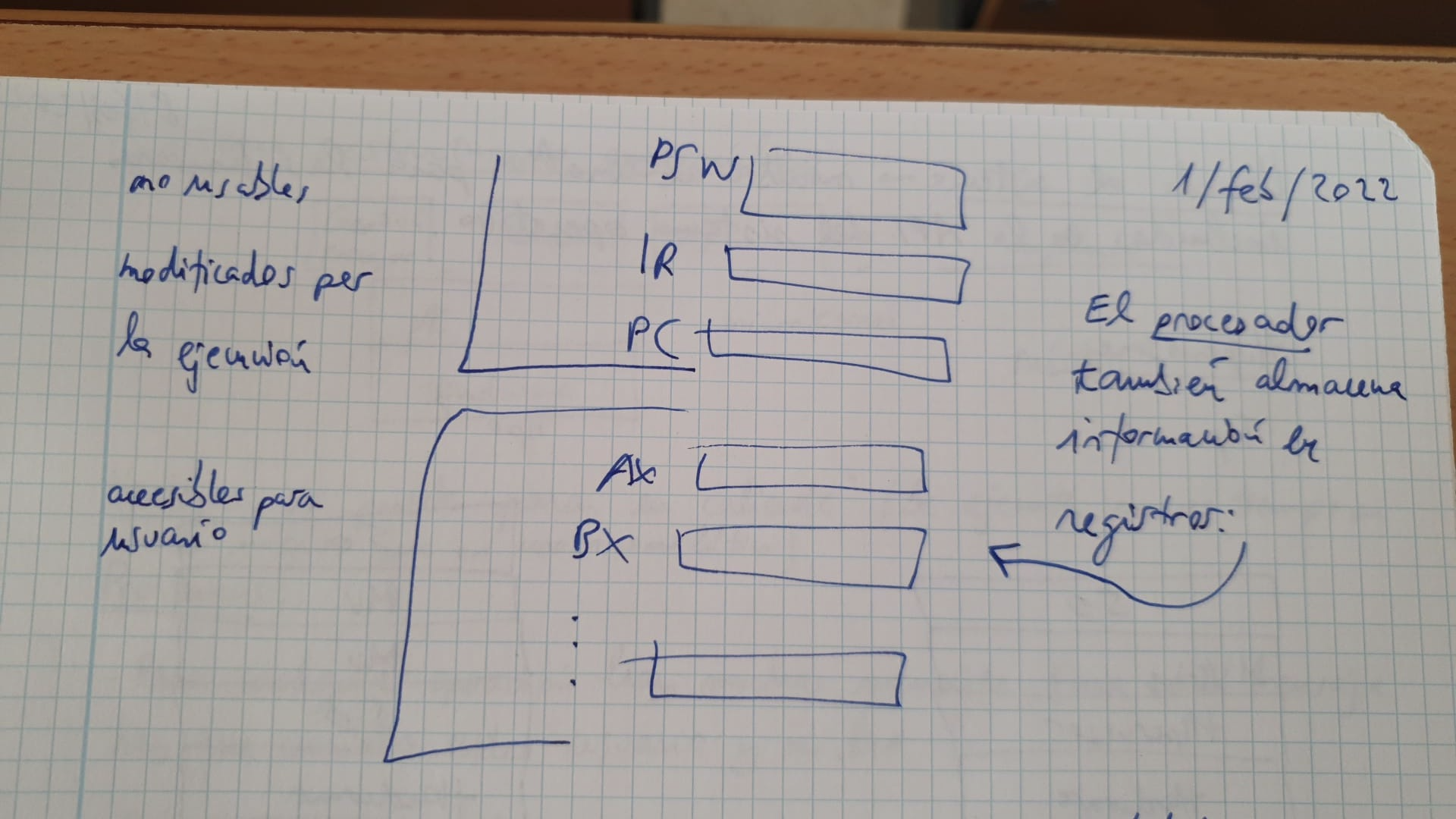
- Situación actual del procesador (valor del PC, palabra de estado PSW, registros)
- Información de otros recursos
- Información de control
- PCB
- Contiene los elementos de un proceso
- Hace posible interrumpir un proceso y después retormar la ejecución
- Creado y gestionado por el SO
- Soporte de múltiples procesos
22 Febrero 2022 🐚
NOTA: la zona de memoria de un proceso es privada, lo que sí comparte es la CPU.
- ¿Qué tipo de interrupciones provocan sí o sí un cambio de proceso en ejecución?
- Llamada al sistema cuando un proceso termina.
- Se le acaba el tiempo de ejecución al proceso.
24 Febrero 2022 🌺
-
Planificador: responsable de decidir los procesos que pasan de estado listo a ejecutándose.
-
Despachador: pasa el proceso a ejecutando.
-
Proceso swapped: que no está en memoria.
-
PLP (planificador a largo plazo) → admite y activa procesos. Aumenta la multiprogramación.
-
PMP (planificador a medio plazo)→ suspende procesos. Los lleva a memoria secundaria y decrementa la multiprogramación.
-
PCP (planificador a corto plazo) → despacha procesos.
Planificaciones
- Sin requisamiento/no expulsivas: sólo hay un cambio de proceso cuando este termina.
- Con requisamiento/expulsivas: hay otros motivos para cambiar de proceso.
- FIFO: first in first out.
- Cuando un proceso está listo para ejecución se coloca al final de la cola.
- Los procesos abandonan voluntariamente la CPU.
- Cuando la CPU queda libre el planificador elige al proceso en la cabeza de la cola de listos.
- SJF: primero el más corto
- Se elige el proceso con menor duración total.
- Exige conocer el tiempo de ejecución antes de ejecutar el trabajo.
- Política no expulsiva.
- Puede provocar inanición de procesos largos (el sistema nunca otorga recursos al proceso largo).
- Planificación cíclica o turno rotatorio:
- Consigue un reparto equitativo del procesador.
- Planificación basada en prioridades:
- La cola de listos está ordenada por prioridad.
- Tipos de prioridad:
- Estática: fija durante toda la vida del proceso
- Dinámica: varía durante la vida del proceso
- Esta política se combina con otras.
- Tipos de prioridad:
- La cola de listos está ordenada por prioridad.
NOTA:
Políticas actuales: combinación de políticas expulsivas
Colas multinivel con Prioridades dinámicas + Turno rotatorio
1 Marzo 2022 🪐
- Hilo: flujo de ejecución dentro de un proceso.
- Puede haber varios hilos dentro del mismo programa.
- Todos los hilos forman parte del mismo proceso.
- Todos los recursos son compratidos, salvo lo que ejecutan en cada momento (no comparten PC, registros, Pila).
- ULT: Todas las operaciones con hilos se realizan a nivel de usuario (operaciones mucho más rápidas, pero sin paralelismo).
- KLT: las operaciones con hilos se realizan a nivel de kernel (más lentas pero con paralelismo).
---TEMA 3, concurrencia 🐿---
- La concurrencia aparece con la multiprogramación.
- El primer programa concurrente que aparece es el SO.
- Condicion de carrera: el resultado del programa no siempre es el mismo con los mismos datos.
Mecanismos de sincronización
- Semáforos
- Mutex
- Variables condicionales
- Señales
Mecanismos de comunicación
- Archivos o ficheros
- Pipes
- Memoria compartida
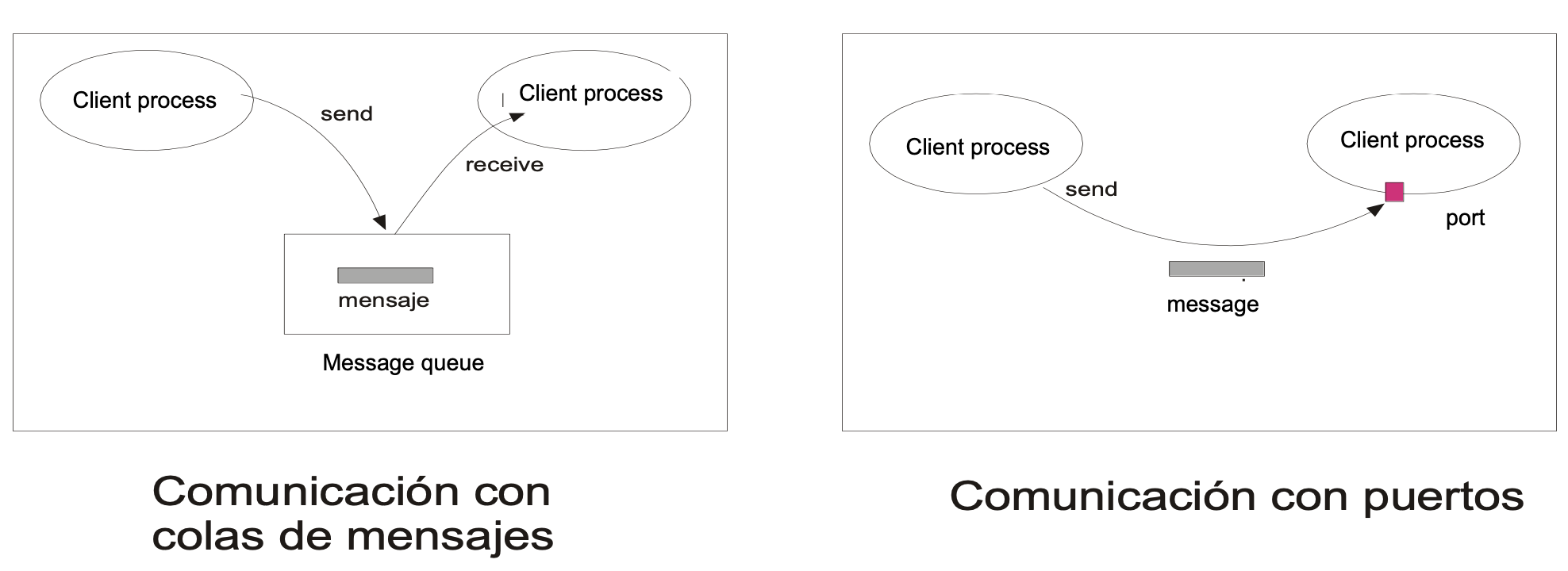
- Mensajes
- Pipes: ficheros donde un proceso escribe por un lado mientras que otro lee. Puede haber varios procesos escribiendo/leyendo a la vez. La sincronización está garantizada.
Tipos de comunicación
- Síncrona total: emisor dormido hasta que el receptor recibe el mensaje.
- Síncrona intermedia: emisor no se duerme pero el receptor se bloquea hasta que recibe el mensaje.
- Asíncrona: nadie espera.
NOTA: los procesos envían mensajes a los buzones y los reciben de buzones.
- Interbloqueo: se produce cuando un proceso se encuentra esperando a un proceso que no puede ocurrir.
- Estrategias para evitar el interbloqueo:
- Ignorar (actualmente usada)
- Detectar y recuperar
- Evitar
- Prevención
---TEMA 4, gestión de memoria 🦖---
10 Marzo 2022 🌊
- Un proceso no puede acceder a la dirección de memoria de otro proceso.
- Actualmente la gestión de memoria resuelve aspectos como:
- Carga y ubicación de programas
- Traducción de direcciones lógicas a físicas
- Presencia simultánea de más de un programa
- Posibilidad de cargar rutinas en tiempo de ejecución (dll)
- Compartición de memoria por varios programas
- Ejecución de programas que no caben completos
- Gestión eficiente del espacio libre

- En ejecución el programa debe acceder a direcciones físicas de memoria principal.
- En sistemas monoprogramación dir. física = dir. lógica
- En multiprogramación hay más de un proceso a la vez, cada uno cargado a partir de su dirección base. La dir. física != dir. lógica
15 Marzo 2022 🍩
Particiones físicas o estáticas
- La memoria real no genera fragmentación externa, porque son particiones estáticas.
- Genera fragmentación interna, ya que el espacio desaprovechado en una partición no puede ser utilizado por otro proceso. NOTA: fragmentación → % de memoria desaprovechado
Particiones variables o dinámicas (más complicadas)
- Condensación de huecos: si hay dos particiones libres adyacentes se juntan en una sola.
- Compactación: mover todos los procesos y los huecos a otra parte de la memoria.
♻️ Segunda parte → SO Segunda Parte 🖥